Underwater robotics is hard for all the reasons that make the ocean interesting: communication is limited, visibility is unpredictable, terrain is uneven, and every vehicle has to make decisions while constrained by real physical movement. SWIM, short for Underwater SWarm sIMulator, is a Java-based 3D simulator built to explore exactly that world.
The project, available on GitHub, focuses on swarms of Autonomous Underwater Vehicles, or AUVs. Rather than treating each robot as a perfect point moving freely in space, SWIM models vehicles with physical constraints and limited degrees of freedom. That choice matters: underwater swarm behavior is only meaningful if the agents have to deal with the same kinds of movement limits that real robots face.

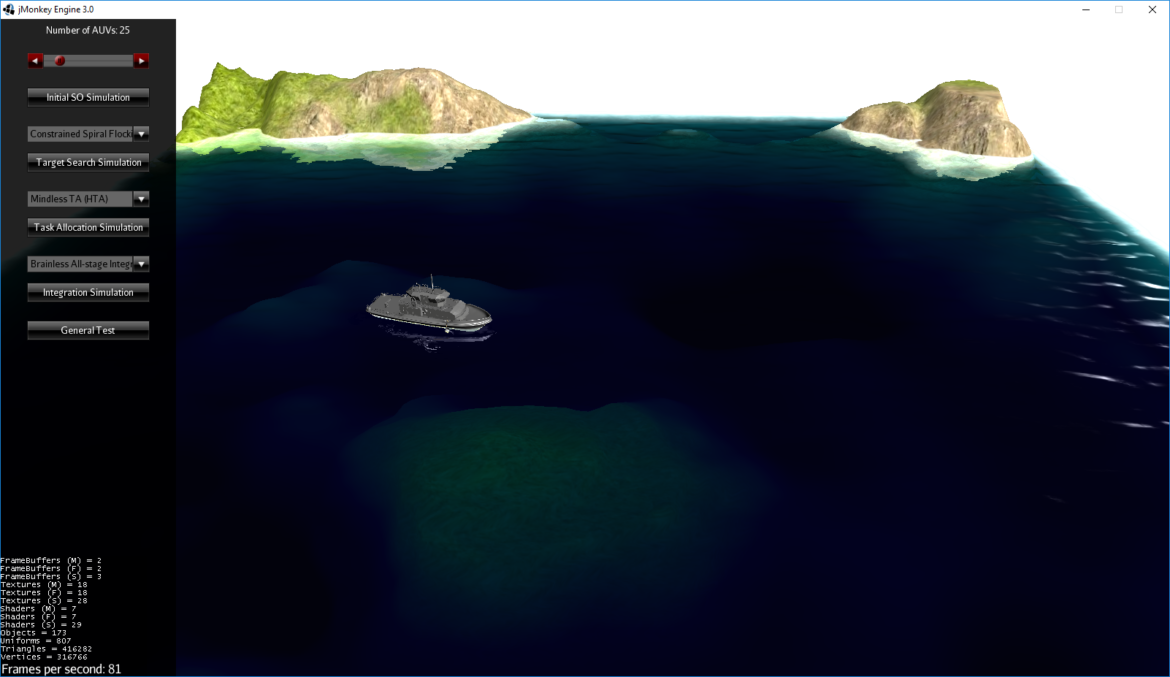
SWIM is built on jMonkeyEngine, using its 3D/game-development foundation and physics support to create a richer simulation environment. The result is a tool that sits between two extremes: simple abstract swarm models on one side, and highly detailed individual-robot simulators on the other. It gives researchers enough realism to test meaningful behavior, while still keeping the system practical for swarm-scale experimentation.
One of SWIM’s strengths is its support for different simulation modes. Researchers can isolate specific stages of a mission, such as self-organization, search, or task allocation, then later connect those stages through an integration mode for full mission testing. There is also a general testing mode for experimental or unfinished algorithms.

The simulator also offers two environment styles. A complex mode includes more realistic underwater scenery, terrain, water effects, waves, and underwater camera behavior. A simpler platform mode strips away visual and environmental detail when performance or large swarm size matters more than visual fidelity. That flexibility makes SWIM useful both as a research tool and as a visual way to understand swarm behavior.

Another practical feature is automated test running. SWIM can repeatedly execute simulations and generate result files for later analysis, which is especially useful for validation, comparison, and averaging across multiple runs.
At its heart, SWIM is a research playground for asking difficult questions: How should underwater robots organize themselves? How do they search? How should tasks be allocated when communication and movement are constrained? And how can individual autonomy produce coordinated group behavior?
For anyone interested in underwater robotics, swarm intelligence, or simulation-driven research, SWIM is a compact but thoughtful project worth exploring.
Leave a Reply